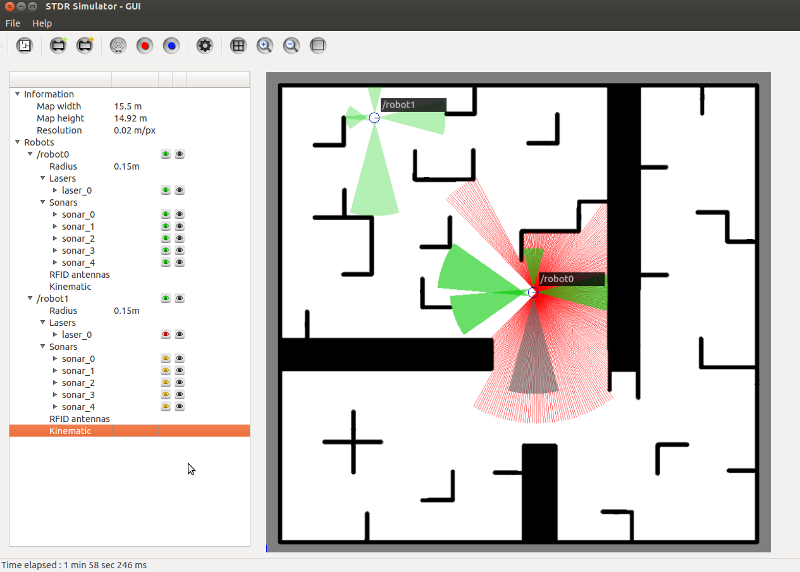
Simple Two Dimentional Robot Simulator (STDR Simulator) is a 2-D multi-robot Unix simulator. Its goals are :
Easy multi-robot 2-D simulation
STDR Simulator's goal is not to be the most realistic simulator, or the one with the most functionalities. Our intention is to make a single robot's, or a swarm's simulation as simple as possible, by minimizing the needed actions the researcher has to perform to start his/hers experiment. In addition, STDR can function with or without a graphical environment, which allows for experiments to take place even using ssh connections.
To be ROS compliant
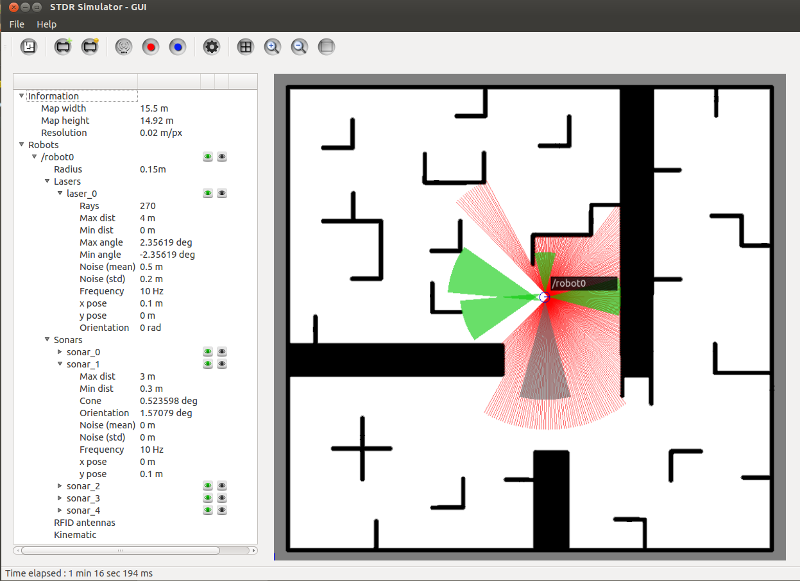
STDR Simulator is created in way that makes it totally ROS compliant. Every robot and sensor emits a ROS transformation (tf) and all the measurements are published in ROS topics. In that way, STDR uses all ROS advantages, aiming at easy usage with the world's most state-of-the-art robotic framework. The ROS compliance also suggests that the Graphical User Interface and the STDR Server can be executed in different machines, as well as that STDR can work together with ROS Rviz!
STDR Simulator ROS packages
stdr_server, Implements synchronization and coordination functionalities of STDR Simulator
stdr_robot, Provides robot, sensor implementation, using nodelets for stdr_server to load them
stdr_parser, Provides a library to STDR Simulator, to parse yaml and xml description files.
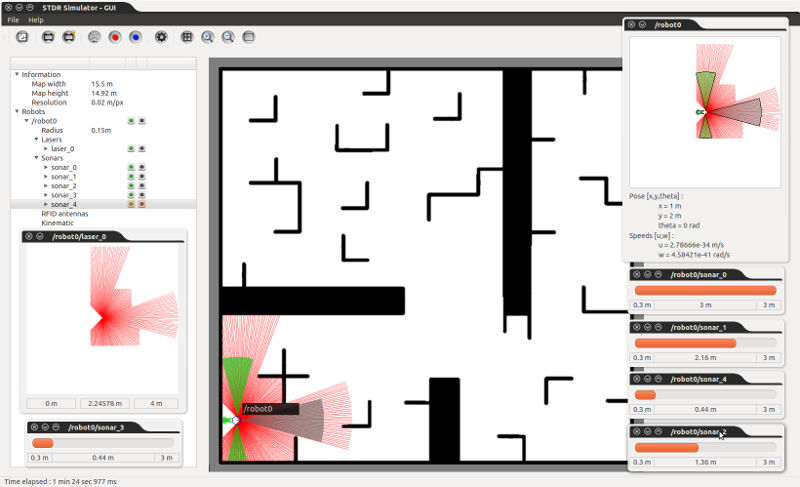
stdr_gui, A gui in Qt for visualizing purposes in STDR Simulator.
stdr_msgs, Provides msgs, services and actions for STDR Simulator.
stdr_launchers, Launch files, to easily bringup server, robots, guis
stdr_resources, Provides robot and sensor descripiton files for STDR Simulator.
stdr_samples, Provides sample codes to demonstrate STDR simulator functionalities.
In addition detailed information about each package can be found in the following ROS wiki pages:
stdr_simulator, Main page with an architectural overview.
stdr_server, Implements synchronization and coordination functionalities of STDR Simulator
stdr_robot, Provides robot, sensor implementation, using nodelets for stdr_server to load them
stdr_parser, Provides a library to STDR Simulator, to parse yaml and xml description files.
stdr_gui, A gui in Qt for visualizing purposes in STDR Simulator.
stdr_msgs, Provides msgs, services and actions for STDR Simulator.
stdr_launchers, Launch files, to easily bringup server, robots, guis
stdr_resources, Provides robot and sensor descripiton files for STDR Simulator.
stdr_samples, Provides sample codes to demonstrate STDR simulator functionalities.
Functionality status
... and ways to contribute
As STDR Simulator is still at the 0.2 version, would would appreciate some help! So we encourage you to fork our code and help us improve it. Though we would prefer not to make any large extend changes, as the final code structure is going to change in the next release.
It would be great if you provide us information about bugs and generally features you would like to see in STDR Simulator. Also you can help us enrich our robot and sensor yaml database as well as provide us with more map files!
We hope that all these will work in the next releases!
How can I contact you?
Contact information
Our e-mail is stdr.simulator [at] gmail [dot] com. We also have a google group, so if you're interested in participating more actively, please send us an e-mail to let you in! Looking forward to hear from you :)
Copyright (c) 2014 STDR Simulator. All rights reserved.